MARS2: Agile and Robust Flight Control of Modular Aerial Robot Systems
Abstract
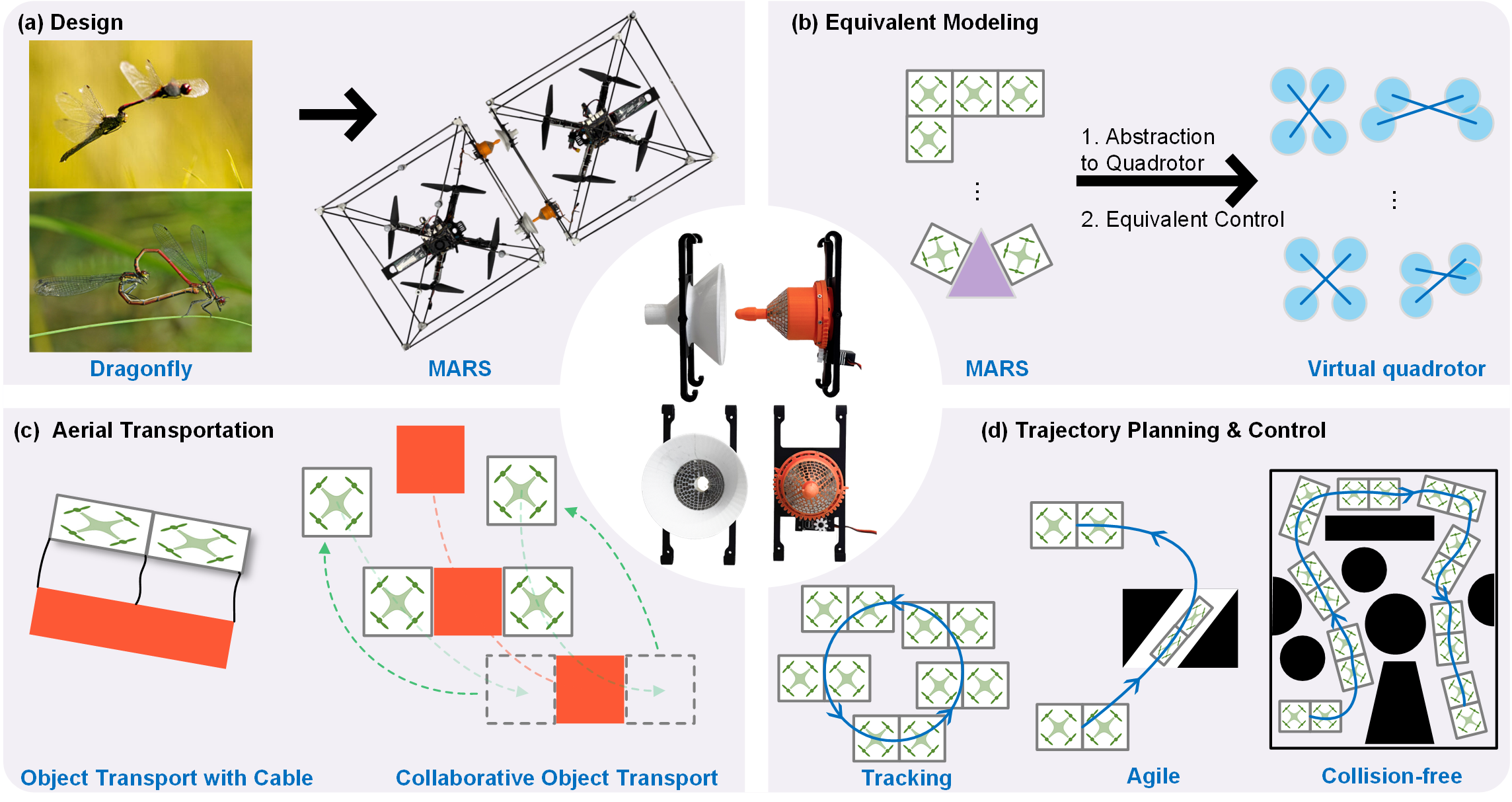
Modular Aerial Robot Systems (MARS), composed of multiple self-reconfigurable drone units, offer high adaptability to diverse mission scenarios and fault conditions. Existing docking mechanism designs for MARS are prone to significant oscillations during docking and separation. Moreover, their control systems are conservative and sensitive to disturbances, which only allow quasi-static hovering flight and waypoint-based flight. To address these disadvantages, we first develop a highly integrated mechanical system that significantly simplifies passive docking, detection-free passive locking, and active separation by using a single servo motor. Our experimental results demonstrate substantial improvements in smooth and stable docking and separation performance. To fully unleash the redundant control actuation of MARS, we further propose an equivalent modeling framework that abstracts arbitrary MARS configurations into a unified virtual quadrotor representation. Building on this abstraction, we design and implement a model predictive control algorithm for MARS of arbitrary configurations. Moreover, we develop efficient algorithms to map the virtual thrust and torque control commands to those of individual units.